
NASA’s Phoenix Mars Lander to Begin Rasping Frozen Layer
TUCSON, Ariz. — A powered rasp on the back of the robotic arm scoop of NASA’s Phoenix Mars Lander is being tested for the first time on Mars in gathering sample shavings of ice.
The lander has used its arm in recent days to clear away loose soil from a subsurface layer of hard-frozen material and create a large enough area to use the motorized rasp in a trench informally named “Snow White.”
The Phoenix team prepared commands early Tuesday for beginning a series of tests with the rasp later in the day. Engineers and scientists designed the tests to lead up to, in coming days, delivering a sample of icy soil into one of the lander’s laboratory ovens.
“While Phoenix was in development, we added the rasp to the robotic arm design specifically to grind into very hard surface ice,” said Barry Goldstein, Phoenix project manager at NASA’s Jet Propulsion Laboratory, Pasadena, Calif. “This is the exactly the situation we find we are facing on Mars, so we believe we have the right tool for the job. Honeybee Robotics in New York City did a heroic job of designing and delivering the rasp on a very short schedule.”
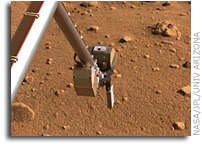
The rasp bit extends at a shallow angle out of an opening on the back of the scoop at the end of the 2.35-meter-long (7.7-foot-long) robotic arm. To use it, the back surface of the scoop is placed on the ground, and a motor rotates the rasp. The angle of the rasp is increased from nearly horizontal to slightly steeper while it is rotating, so the tool kicks shavings sideways onto a collection surface just inside the opening. After the rasp stops, a series of moves by the scoop then shifts the collected shavings from the back of the scoop, past baffles, to the front of the scoop. The baffles serve to keep material from falling out of the rasp opening when the scoop is used as a front loader.
The commands prepared for Phoenix’s activities Tuesday called for rasping into the hard material at the bottom of the Snow White trench at two points about one centimeter (0.4 inch) apart. The lander’s Surface Stereo Imager and robotic arm camera will be used to check the process at several steps and to monitor any resulting sample in the scoop for several hours after it is collected.
Collecting an icy sample for an oven of Phoenix’s Thermal and Evolved-Gas Analyzer (TEGA) may involve gathering shavings collected at the rasp opening and scooping up additional shavings produced by the rasp. The Phoenix team has been testing this combination on simulated Martian ice with a near-replica model of Phoenix in a test facility at the University of Arizona, Tucson.
The Phoenix mission is led by Peter Smith of the University of Arizona with project management at JPL and development partnership at Lockheed Martin, Denver. International contributions come from the Canadian Space Agency; the University of Neuchatel; the universities of Copenhagen and Aarhus, Denmark; Max Planck Institute, Germany; and the Finnish Meteorological Institute. For more about Phoenix, visit: http://www.nasa.gov/phoenix and http://phoenix.lpl.arizona.edu.






